|
Image Component Library (ICL)
|
|
Image Component Library (ICL)
|
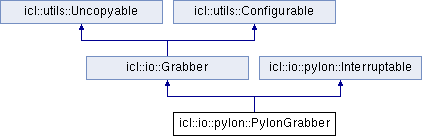
Grabber implementation for a Basler Pylon-based GIG-E Grabber. More...
#include <PylonGrabber.h>
Public Member Functions | |
| ICLIO_API | PylonGrabber (const Pylon::CDeviceInfo &dev, const std::string args) |
| The constructor. | |
| ICLIO_API | ~PylonGrabber () |
| Destructor. | |
| virtual ICLIO_API const core::ImgBase * | acquireImage () |
| grab function grabs an image (destination image is adapted on demand) | |
Static Public Member Functions | |
| static ICLIO_API Pylon::CDeviceInfo | getDeviceFromArgs (std::string args) throw (utils::ICLException) |
| Uses args to choose a pylon device. | |
Private Member Functions | |
| void | acquisitionStart () |
| starts the acquisition of pictures by the camera | |
| void | acquisitionStop () |
| stops the acquisition of pictures by the camera | |
| void | grabbingStart () |
| creates buffers and registers them at the grabber | |
| void | grabbingStop () |
| deregisters buffers from grabber and deletes them | |
| void | cameraDefaultSettings () |
| helper function that makes default settings for the camera. | |
| void | convert (const void *pImageBuffer) |
| Converts pImageBuffer to correct type and writes it into m_Image. | |
Static Private Member Functions | |
| static void | printHelp () |
| Prints information about the startup argument options. | |
Private Attributes | |
| utils::Mutex | m_ImgMutex |
| A mutex lock to synchronize buffer and color converter access. | |
| PylonAutoEnv | m_PylonEnv |
| The PylonEnvironment automation. | |
| Pylon::IPylonDevice * | m_Camera |
| The camera interface. | |
| Pylon::IStreamGrabber * | m_Grabber |
| The streamGrabber of the camera. | |
| PylonCameraOptions * | m_CameraOptions |
| PylonCameraOptions used to get and set camera settings. | |
| PylonColorConverter * | m_ColorConverter |
| PylonColorConverter used for color conversion. | |
| PylonGrabberThread * | m_GrabberThread |
| PylonGrabberThread used for continous image acquisition. | |
| std::vector < PylonGrabberBuffer< uint16_t > * > | m_BufferList |
| A list of used buffers. | |
| core::ImgBase * | m_LastBuffer |
| A pointer to the last used buffer. | |
Static Private Attributes | |
| static const int | m_NumBuffers = 3 |
| Count of buffers for grabbing. | |
Grabber implementation for a Basler Pylon-based GIG-E Grabber.
This is just a wrapper class of the underlying PylonGrabberImpl class
Some useful hints to increase GigE camera output:
- rtprio 99
/etc/security/limits.conf
| ICLIO_API icl::io::pylon::PylonGrabber::PylonGrabber | ( | const Pylon::CDeviceInfo & | dev, |
| const std::string | args | ||
| ) |
The constructor.
| dev | The PylonDevice that should be used for image acquisition. |
| args | The arguments provided to this grabber. |
Destructor.
| virtual ICLIO_API const core::ImgBase* icl::io::pylon::PylonGrabber::acquireImage | ( | ) | [virtual] |
grab function grabs an image (destination image is adapted on demand)
grab function calls the Grabber-specific acquireImage-method and applies distortion if necessary
If dst is not NULL, it is exploited and filled with image data
Reimplemented from icl::io::Grabber.
| void icl::io::pylon::PylonGrabber::acquisitionStart | ( | ) | [private, virtual] |
starts the acquisition of pictures by the camera
Implements icl::io::pylon::Interruptable.
| void icl::io::pylon::PylonGrabber::acquisitionStop | ( | ) | [private, virtual] |
stops the acquisition of pictures by the camera
Implements icl::io::pylon::Interruptable.
| void icl::io::pylon::PylonGrabber::cameraDefaultSettings | ( | ) | [private] |
helper function that makes default settings for the camera.
| void icl::io::pylon::PylonGrabber::convert | ( | const void * | pImageBuffer | ) | [private] |
Converts pImageBuffer to correct type and writes it into m_Image.
| static ICLIO_API Pylon::CDeviceInfo icl::io::pylon::PylonGrabber::getDeviceFromArgs | ( | std::string | args | ) | throw (utils::ICLException) [static] |
Uses args to choose a pylon device.
| args | The arguments provided to this grabber. |
| ICLException | when no suitable device exists. |
| void icl::io::pylon::PylonGrabber::grabbingStart | ( | ) | [private, virtual] |
creates buffers and registers them at the grabber
Implements icl::io::pylon::Interruptable.
| void icl::io::pylon::PylonGrabber::grabbingStop | ( | ) | [private, virtual] |
deregisters buffers from grabber and deletes them
Implements icl::io::pylon::Interruptable.
| static void icl::io::pylon::PylonGrabber::printHelp | ( | ) | [static, private] |
Prints information about the startup argument options.
std::vector<PylonGrabberBuffer<uint16_t>*> icl::io::pylon::PylonGrabber::m_BufferList [private] |
A list of used buffers.
Pylon::IPylonDevice* icl::io::pylon::PylonGrabber::m_Camera [private] |
The camera interface.
PylonCameraOptions used to get and set camera settings.
PylonColorConverter used for color conversion.
Pylon::IStreamGrabber* icl::io::pylon::PylonGrabber::m_Grabber [private] |
The streamGrabber of the camera.
PylonGrabberThread used for continous image acquisition.
A mutex lock to synchronize buffer and color converter access.
A pointer to the last used buffer.
const int icl::io::pylon::PylonGrabber::m_NumBuffers = 3 [static, private] |
Count of buffers for grabbing.
The PylonEnvironment automation.
 1.7.6.1
1.7.6.1

