|
Image Component Library (ICL)
|
|
Image Component Library (ICL)
|
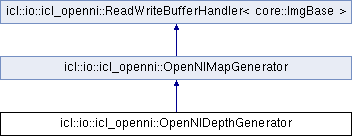
Depth Image Generator. More...
#include <OpenNIUtils.h>
Public Member Functions | |
| OpenNIDepthGenerator (int num) | |
| Creates DepthGenerator number num from Context. | |
| ~OpenNIDepthGenerator () | |
| Destructor frees all resouurces. | |
| bool | acquireImage (core::ImgBase *dest) |
| grab function grabs an image returns whether grabbing worked | |
| bool | newFrameAvailable () |
| checks whether a new frame is available | |
| Generators | getGeneratorType () |
| tells the type of the Generator | |
| xn::MapGenerator * | getMapGenerator () |
| returns underlying xn::MapGenerator instance | |
| core::ImgBase * | initBuffer () |
| Creates an core::Img16s for ReadWriteBuffer. | |
| MapGeneratorOptions * | getMapGeneratorOptions () |
| getter for MapGeneratorOptions | |
Private Attributes | |
| xn::DepthGenerator * | m_DepthGenerator |
| the underlying core::depth generator | |
| xn::DepthMetaData | m_DepthMD |
| a DepthMetaData object holding image information | |
| MapGeneratorOptions * | m_Options |
| pointer to internally used MapGeneratorOptions | |
| unsigned int | m_FrameId |
| the id of the last grabbed frame | |
Depth Image Generator.
Creates DepthGenerator number num from Context.
Destructor frees all resouurces.
| bool icl::io::icl_openni::OpenNIDepthGenerator::acquireImage | ( | core::ImgBase * | dest | ) | [virtual] |
grab function grabs an image returns whether grabbing worked
Implements icl::io::icl_openni::OpenNIMapGenerator.
tells the type of the Generator
Implements icl::io::icl_openni::OpenNIMapGenerator.
| xn::MapGenerator* icl::io::icl_openni::OpenNIDepthGenerator::getMapGenerator | ( | ) | [virtual] |
returns underlying xn::MapGenerator instance
Implements icl::io::icl_openni::OpenNIMapGenerator.
| MapGeneratorOptions* icl::io::icl_openni::OpenNIDepthGenerator::getMapGeneratorOptions | ( | ) | [virtual] |
getter for MapGeneratorOptions
Implements icl::io::icl_openni::OpenNIMapGenerator.
Creates an core::Img16s for ReadWriteBuffer.
Implements icl::io::icl_openni::OpenNIMapGenerator.
| bool icl::io::icl_openni::OpenNIDepthGenerator::newFrameAvailable | ( | ) | [virtual] |
checks whether a new frame is available
Implements icl::io::icl_openni::OpenNIMapGenerator.
xn::DepthGenerator* icl::io::icl_openni::OpenNIDepthGenerator::m_DepthGenerator [private] |
the underlying core::depth generator
xn::DepthMetaData icl::io::icl_openni::OpenNIDepthGenerator::m_DepthMD [private] |
a DepthMetaData object holding image information
unsigned int icl::io::icl_openni::OpenNIDepthGenerator::m_FrameId [private] |
the id of the last grabbed frame
pointer to internally used MapGeneratorOptions
 1.7.6.1
1.7.6.1

