|
Image Component Library (ICL)
|
|
Image Component Library (ICL)
|
Utility structure that represents a 2D homography (implemented for float and double) More...
#include <Homography2D.h>
Public Types | |
| enum | Algorithm { Simple, Advanced } |
| Internally used algorithm type. More... | |
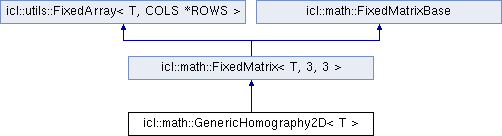
| typedef FixedMatrix< T, 3, 3 > | Super |
| super class typedef for shorter super-class references | |
Public Member Functions | |
| GenericHomography2D () | |
| Empty constructor. | |
| GenericHomography2D (const utils::Point32f *pAs, const utils::Point32f *pBs, int n=4, Algorithm algo=Advanced) | |
| Constructor from given two point sets of size n>=4. | |
| utils::Point32f | apply (const utils::Point32f &p) const |
| applies the homography | |
| utils::Point32f | apply_int (const utils::Point32f &p) const |
| applies the homography | |
Static Public Member Functions | |
| static utils::Point32f | apply_homography (const FixedMatrix< float, 3, 3 > &H, const utils::Point32f &p) |
| applies a given homography matrix | |
| static utils::Point | apply_homography_int (const FixedMatrix< float, 3, 3 > &H, const utils::Point &p) |
| applies a given homography matrix | |
Utility structure that represents a 2D homography (implemented for float and double)
Basically, a 2D homography implements a transformation between 2 paralellograms Given a set of at least 4 points in parallellogram A and the same number of corresponding points in parallelogram B, the homography (affine 2D transformation between space A and space B is defined as follows:
 must transform each point
must transform each point  (given wrt. space A) to it's corresponding point
(given wrt. space A) to it's corresponding point  . Please refer to Wikipedia or the class implementation for more details:
. Please refer to Wikipedia or the class implementation for more details:
The Homography2D class provides two different algorithms: a faster simple one, and a slightly slower, but more elaborated one. The simple algorithm creates a simpler matrix whose last row becomes (0,0,1)^T. In some cases, this is enough, which is why, this algorithm is provided even though, it does not lead to perfect results.
The homography is used to transform a set of homogeneous 2D source points  into a set of 2D destination points
into a set of 2D destination points  . Since we search for a linear transformation, This transformation H is modelled by a 3x3 matrix whose last element is fixed to 1. We call the rows of H X,Y,L, which leads to the targeted equation:
. Since we search for a linear transformation, This transformation H is modelled by a 3x3 matrix whose last element is fixed to 1. We call the rows of H X,Y,L, which leads to the targeted equation:
![\[ H a_i = b_i \;\;\; \forall i \in [0,n[ \]](form_9.png)
The most simple approach is to stack all and all horizontally which leads to the equation
![\[ H A = B \]](form_10.png)
![\[ H (a_0 a_1 a_2 ... a_{n-1}) = (b_0 b_1 b_2 ... b_{n-1}) \]](form_11.png)
Obviously, this can be solved using a standard pseudoinverse approach
![\[ H = B A^{-1} \]](form_12.png)
This approach does somehow optimize the problem, but it does not really touch the last row of H. Therefore, the results of this simple approach are sometimes not good enough. Please continue with The Advanced Algorithm
In order to also fill the last row of H with optimal values, the originating problem must be reformulated in matrix notation in a different way:
Again, we start with
For a single (we call it a and the counter part b resp.), we always have two formulas, one for the x- and one for the y-component.
![\[ H ( a_x a_y 1 )^T = (b_x b_y 1)^T \]](form_13.png)
Decomposing H to its rows X,Y and L, this can be reformulated as
![\[ \frac{X a}{L a} = b_x \;\;\;\;\;and\;\;\;\;\;\; \frac{Y a}{L a} = b_y \]](form_14.png)
![\[ \Leftrightarrow \frac{X a}{b_x} = La \;\;\;\;\;and\;\;\;\;\;\; \frac{Y a}{b_y} = La \]](form_15.png)
![\[ \Leftrightarrow \frac{X a}{b_x} - La = 0 \;\;\;\;\;and\;\;\;\;\;\; \frac{Y a}{b_y} - La = 0 \]](form_16.png)
![\[ \Leftrightarrow \frac{X a}{b_x} - L_x a_x - L_y a_y - 1 = 0 \;\;\;\;\;and\;\;\;\;\;\; \frac{Y a}{b_y} - L_x a_x - L_y a_y - 1 = 0 \]](form_17.png)
![\[ \Leftrightarrow \frac{X a}{b_x} - L_x a_x - L_y a_y = 1 \;\;\;\;\;and\;\;\;\;\;\; \frac{Y a}{b_y} - L_x a_x - L_y a_y = 1 \]](form_18.png)
By multiplying with  (
(  resp.), we get
resp.), we get
![\[ \Leftrightarrow X a - L_x b_x a_x - L_y a_y b_x = b_x \;\;\;\;\;and\;\;\;\;\;\; Y a - L_x a_x b_y - L_y a_y b_y = b_y \]](form_21.png)
These two equations can be expressed in a single huge matrix expression  where M is a 2n by 8 matrix, and
where M is a 2n by 8 matrix, and  and r are 2n-dimensional row vectors. M and r are build as follows. For each input/output tuple
and r are 2n-dimensional row vectors. M and r are build as follows. For each input/output tuple  , two rows of M are created using the following scheme:
, two rows of M are created using the following scheme:
![\[ M=\left(\begin{array}{cccccccc} a_x & a_y & 1 & 0 & 0 & 0 & -a_x b_x & -a_y b_x \\ 0 & 0 & 0 & a_x & a_y & 1 & -a_x b_y & -a_y b_y \\ ... \end{array}\right) \]](form_25.png)
The result vector r is just filled with the target values
![\[ r = ( b_x b_y ... )^T \]](form_26.png)
Finally the matrix equation is evaluated with respect to h by
![\[ h = M^{-1} r \]](form_27.png)
And h's elements are put back into the homography matrix H in a row-wise manner. Remember that The last elememt of H was set fixed to 1. Please note: Internally, the matrix equation is solved using an SVD (
| typedef FixedMatrix<T,3,3> icl::math::GenericHomography2D< T >::Super |
super class typedef for shorter super-class references
| enum icl::math::GenericHomography2D::Algorithm |
Internally used algorithm type.
| Simple |
use the simple algorithm (
|
| Advanced |
use the advanced algorithm (
|
| icl::math::GenericHomography2D< T >::GenericHomography2D | ( | ) | [inline] |
Empty constructor.
| icl::math::GenericHomography2D< T >::GenericHomography2D | ( | const utils::Point32f * | pAs, |
| const utils::Point32f * | pBs, | ||
| int | n = 4, |
||
| Algorithm | algo = Advanced |
||
| ) |
Constructor from given two point sets of size n>=4.
| utils::Point32f icl::math::GenericHomography2D< T >::apply | ( | const utils::Point32f & | p | ) | const [inline] |
applies the homography
| static utils::Point32f icl::math::GenericHomography2D< T >::apply_homography | ( | const FixedMatrix< float, 3, 3 > & | H, |
| const utils::Point32f & | p | ||
| ) | [inline, static] |
applies a given homography matrix
| static utils::Point icl::math::GenericHomography2D< T >::apply_homography_int | ( | const FixedMatrix< float, 3, 3 > & | H, |
| const utils::Point & | p | ||
| ) | [inline, static] |
applies a given homography matrix
| utils::Point32f icl::math::GenericHomography2D< T >::apply_int | ( | const utils::Point32f & | p | ) | const [inline] |
applies the homography
 1.7.6.1
1.7.6.1

