Oncilla Component Interface¶
For a CCA application the Oncilla robot is represented by a set of resource nodes and the synchronizer, accessible to the CCA component architecture or via the RSB middleware.
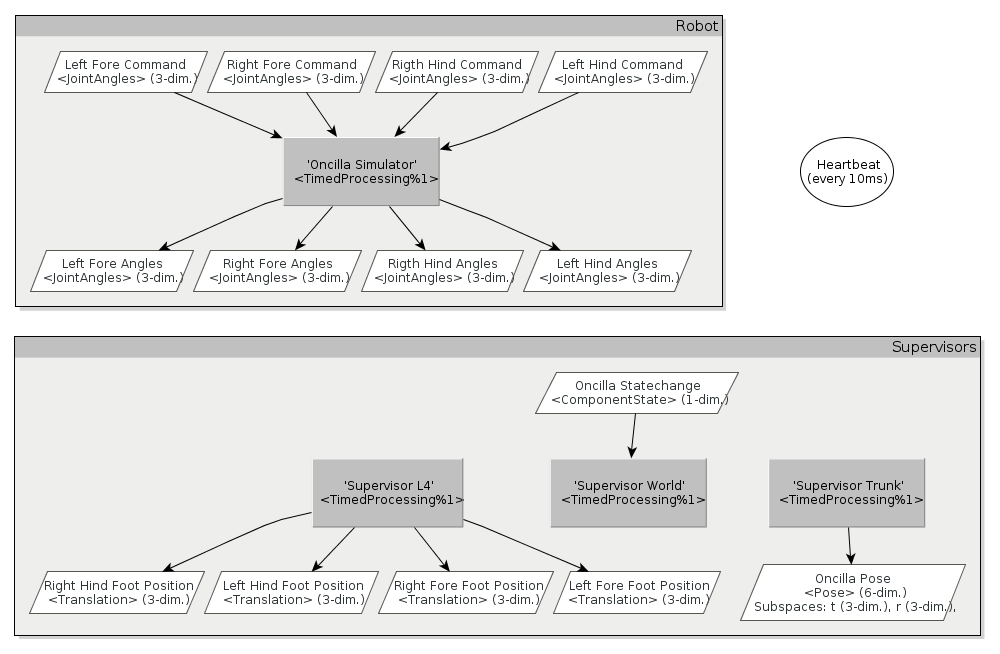
The basic spaces provided by the Oncilla component interfaces are depicted in the image on the right (click to enlarge). The core robot component provides four spaces for the three angles of each leg. It listens for position command on four spaces for the legs.
Additional supervisors (only implemented for the simulation backend) provide the robot pose in world coordinates, cartesian position of the feet and allow to reset the world (only in simulation, of course ;).
libcca-oncilla provides the helper object CCAOncilla that sets up the resource nodes, the synchronizer and a working default configuration. This can be used as basis for custom configurations. The configuration and the available ports are detailed in CCA Oncilla.
Resource Nodes¶
The Resource Nodes are implemented in RCI and wrapped in CCA so that the rich proprioceptive feedback of the robot is available as data-flow on the one hand. On the other hand commands can be sent to the robot via data-flow by sending commands to the resource nodes.
The actual specification of the resource nodes is described in the liboncilla documentation. Documentation of the CCA wrappers can be found here:
- CCA Oncilla L0 - The L0 joint of Oncilla
- CCA Oncilla L1 and L2 - The L1 and L2 joint of Oncilla
- ccaoncillal3 - The L3 joint of Oncilla
- ccaoncillal4 - The L4 joint of Oncilla
Synchronizer¶
The CCA synchronizer component wraps the actual synchronizer and therefore cares for updating the resource nodes and synchronizing the with the robot in the timing given by the CCA application or configuration.